近日,在国务院新闻办公室举行的“高质量完成‘十四五’规划”系列主题新闻发布会上,“矿山智能化”作为提升“本质安全水平”的核心举措被重点提及。发布会披露,通过智能化建设与全链条治理,矿山安全实现从 “被动应对” 到 “事前预防” 的根本性转变,多项核心数据创下历史新高。
网易伏羲 2025-10-28 10:25:19
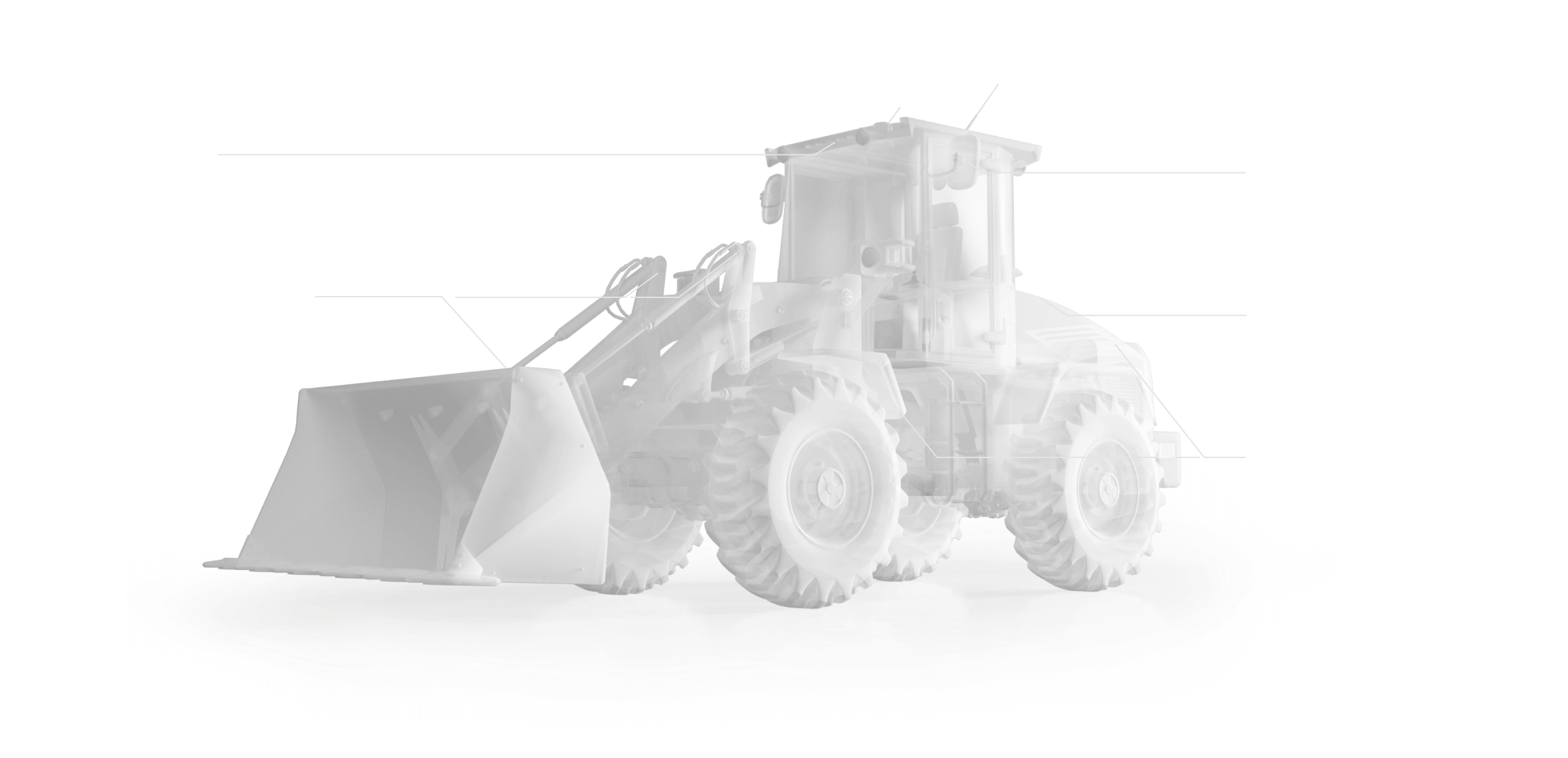



独创的运动控制框架和技术方案,控制装载机自动作业,铲料满斗率达到 95% ,卸料残余率小于 5%
搭配高精度场景感知和识别模块,实现障碍物精准绕避;位姿倾斜检测精度优于1度,紧急情况自动急停,实现全面安全防护
采用视觉感知模块和实时高精度AI算法,对料仓和料斗物料的实时检测,实时检测误差低于5%
智能化改造系统适配市面上各类型号的传统装载机,通过简单改造安装,即可实现全自主作业







